After completing Course #4 of the Coursera Deep Learning specialization I wanted to write a short summary to help y'all understand / brush up on the concept of Convolutional Neural Network (CNN).

Where nc is number of channels/volume in the previous layer. In case of the first layer, the previous layer has 3 channels.

As you can observe, the activation size of the Network reduces gradually where you are down to 10 activations at the output of the Softmax to classify numbers from 0 to 9 and the number of parameters are significantly less than what it would have been if we were to implement this classifier with all layers as Fully connected.
More Readings:
http://cs231n.github.io/convolutional-networks/
Let's understand CNNs with an example -

Figure 1. CNN Example - Source: Coursera DL Specialization
Let's say you have a 32x32 image of digits from 0 to 10 with 3 channels (RGB). You pass it through a filter of size f in the 1st Convolutional Layer (CL1).
What is the size of the output image of the filter?
The size of the output image is calculated by the following formula:
 |
| Source: Medium |
In our case, let's assume padding is 0 and stride is 1. The above formula results in output size of 28x28 for both the height and width of the image. Alright that's a good start! Let's keep going.
Notice the dimension 6 on the output of Layer 1.
Where do we get the third dimension from?
The third dimension is nothing but the number of filters in the layer. Given a filter of size f. There are #f number of filters in the layer and the dimension of EACH filter is of dimension f x f x nc
Where nc is number of channels/volume in the previous layer. In case of the first layer, the previous layer has 3 channels.
Now, If there are 6 such filters in layer 1 each filter produces a nout x nout x 1 output and given we have 6 filters - the output of Convolutional Layer 1 is nout x nout x 6.
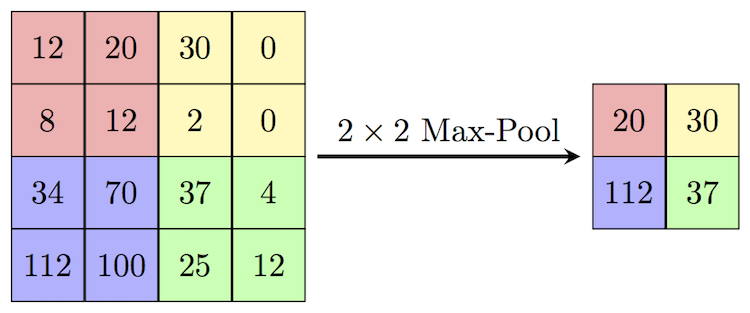
What does Max Pooling do?
Pooling is a method of compressing information, think of high pixel values as more information and low pixel values as less information. Max Pooling is used to pick the maximum element in the filter's window when convolved over the output of the previous layer.
 |
| Source: ComputerScienceWiki |
 |
| Source: ComputerScienceWiki The formula for the output dimensions of the pooling layer is the same as the convolutional layer. Usually for a filter size (f) for pooling, the stride is same as filter size and the size of the output dimensions have an inverse relationship with the stride size. This explains a steep reduction in dimensions from the POOL1 layer. What do we need Convolution, Can we not just flatten the Input Image?
The dimension of our Input image is 32x32x3, if we were to flatten this, the size of our input layer would have been 3072. Imagine, the first hidden layer has 1000 neurons. We would end up with 307,200,00 parameters in the first layer of the network by itself. Training this big of a layer can cause sever overfitting.
With convolution, we have f x f x 3 x 6 parameters. For Layer 1, f = 5 which is 450 parameters in the input layer. Convolution greatly improves computational efficiency!
By the time we reach out fully connected layers with a Convolution followed by Pooling implementation, we have 120 neurons in the First fully connected layer. This causes the number of neurons to drop gradually which has proven to produce better generalization.
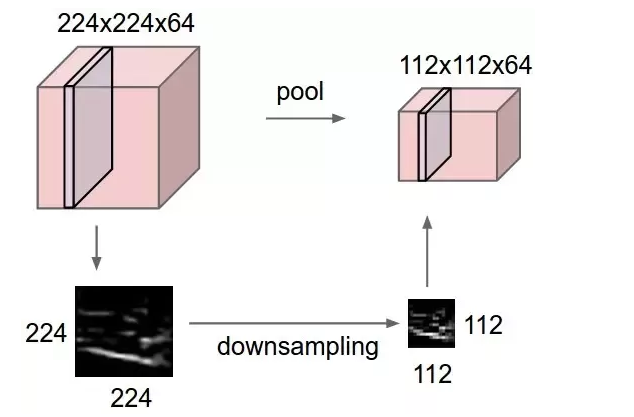
Another thing to note here is as we go deeper in the network the height and width dimensions reduce by the volume/channel dimensions increase. What this means is that the Network is still retaining the information by extracting features - This is what each of those filters are for. Basically, the network is learning filter parameters to extract meaningful information out of your training data and later passing these features to the fully connected layers for classification.
|

Figure 2. CNN Structure Summary - Source: Coursera DL Specialization
More Readings:
http://cs231n.github.io/convolutional-networks/
Comments
Post a Comment